About
I am an undergraduate student interested in robotic systems that connect visual perception, 3D scene understanding, grasp prediction, and motion planning.
Research Interests
Robotics · Computer Vision · 3D Scene Understanding · Robot Manipulation
Projects
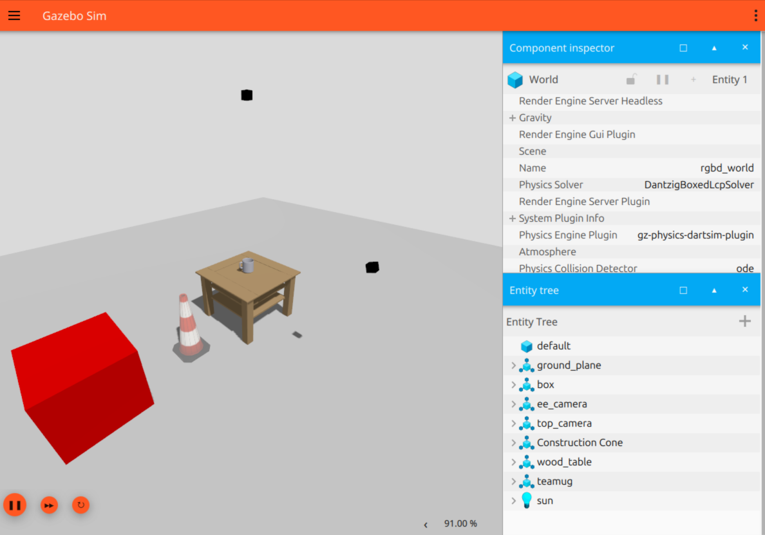
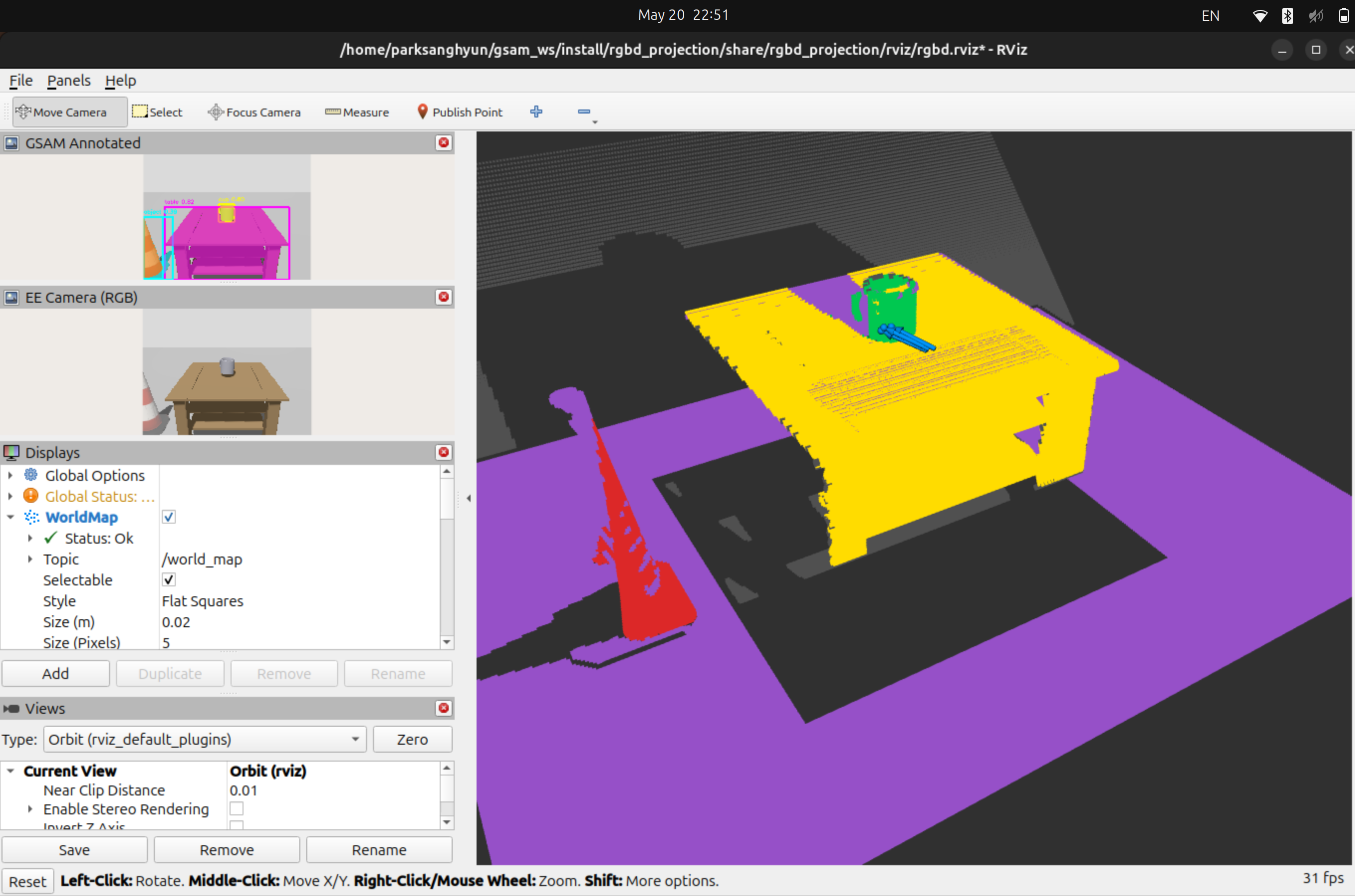
Grounded-SAM + VGN ROS2 Grasping Pipeline
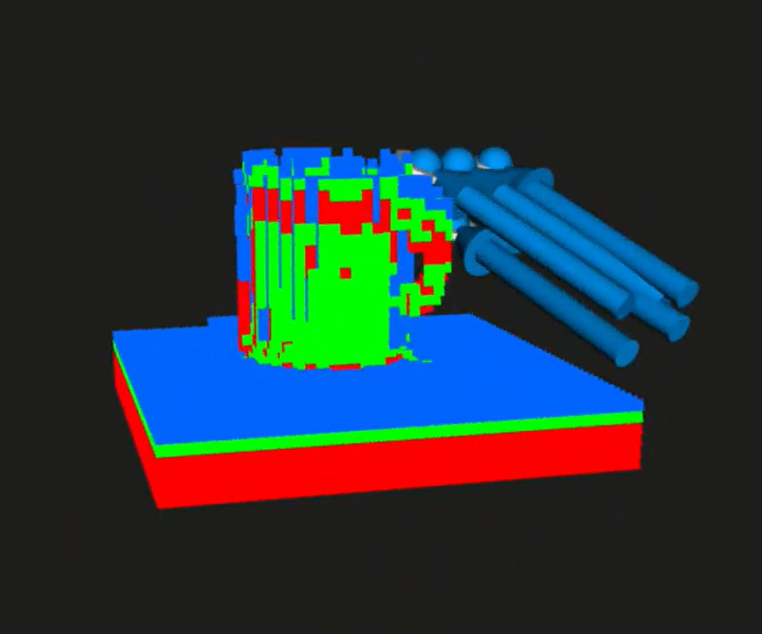
- Built a ROS2-based perception-to-grasp pipeline integrating Grounded-SAM, RGB-D perception, semantic point cloud generation, TSDF construction, and VGN-based grasp candidate prediction.
- Designed the pipeline toward scene-aware robotic grasping and motion planning.
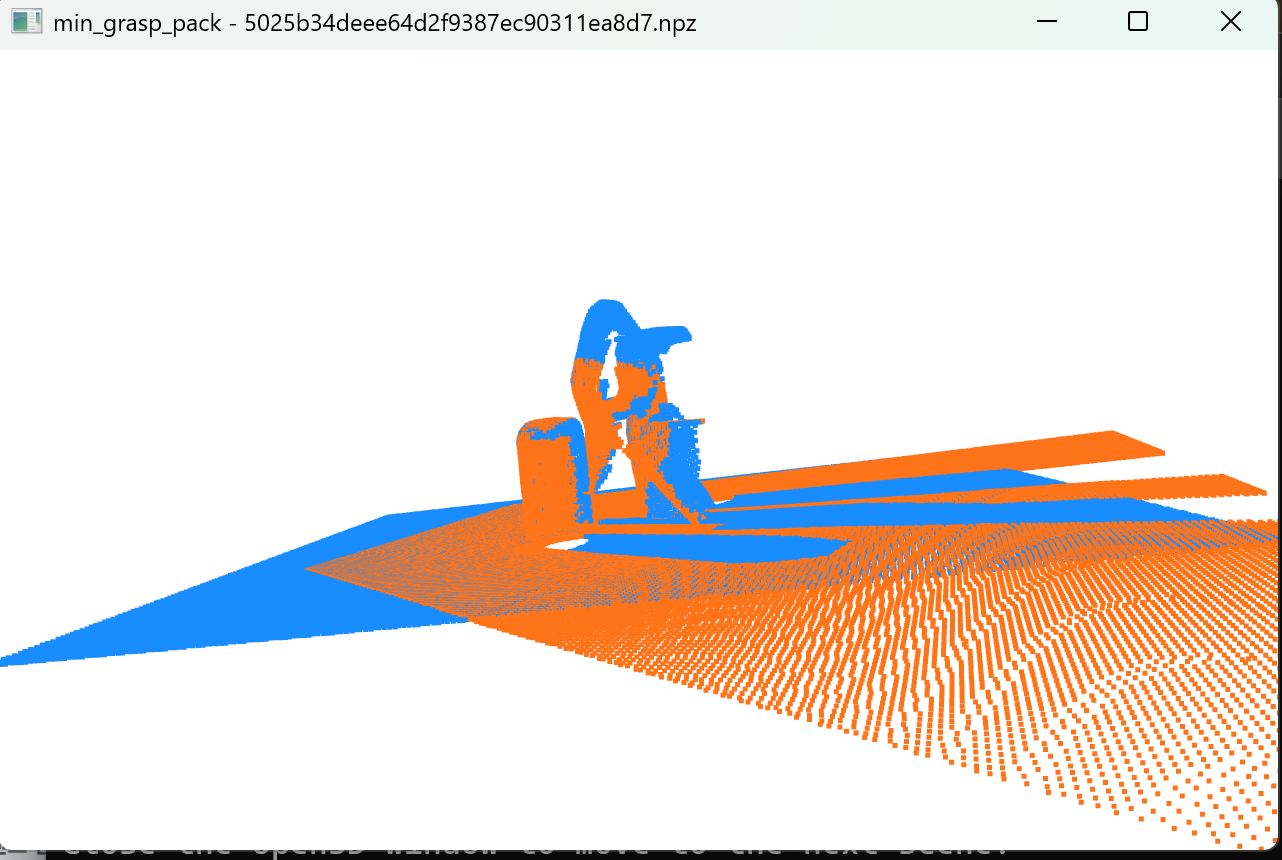
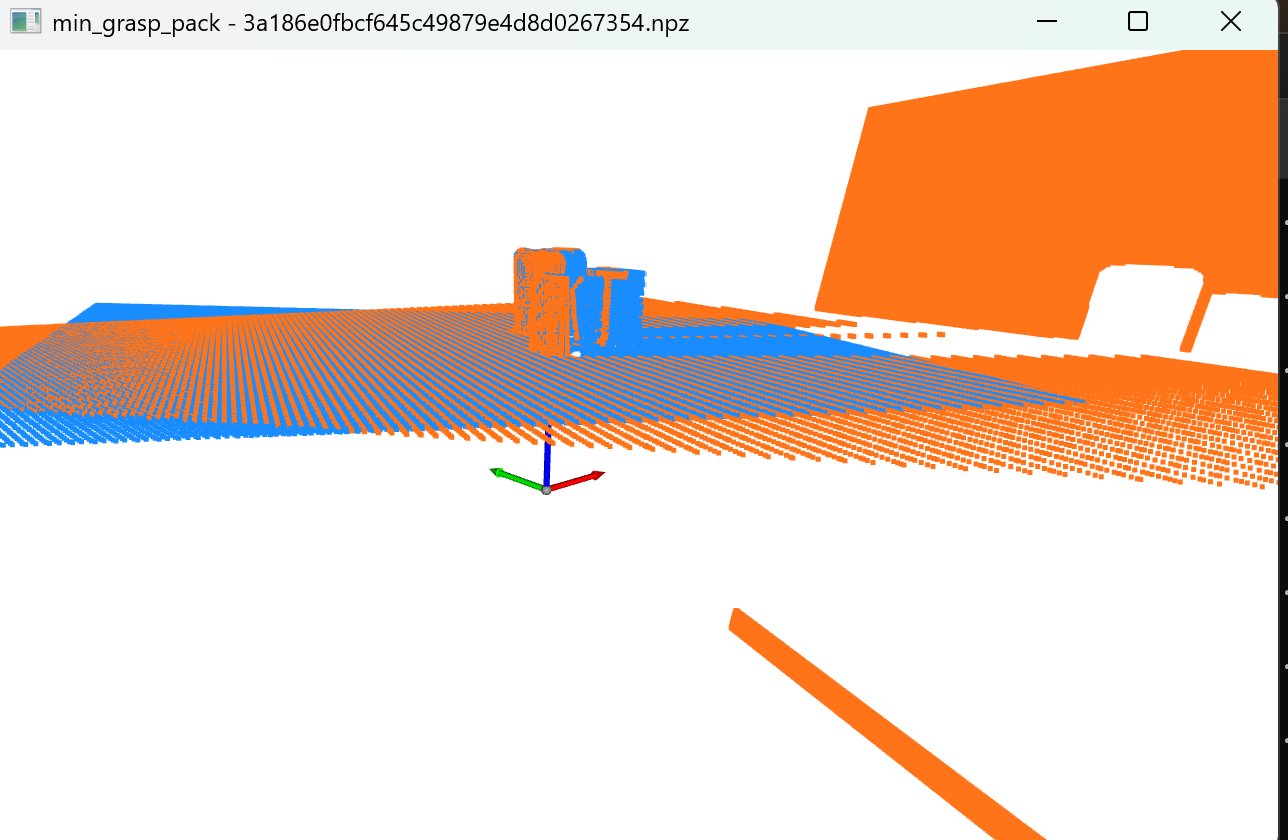
VGN Data Generation & Training Experiments
- Customized VGN data generation pipeline for TSDF-based robotic grasp prediction.
- Generated packed and piled synthetic grasping scenes and conducted VGN training experiments on the KHU Seraph GPU server.
4-DOF Robot Arm
- Designed the 4-DOF robotic arm in Fusion 360 and fabricated it using 3D printing.
- Implemented URDF modeling, RViz2 visualization, and inverse-kinematics-based end-effector control.
Smart Pet Feeder
- Built an ESP32-based IoT pet feeder with MQTT communication, RFID-based pet identification, load-cell weight sensing, and scheduled feeding control.
- Implemented the MQTT communication layer between the ESP32 device and the mobile app, including JSON command handling, schedule updates, and feeding status publishing.
- Awarded in a university software project competition.

Awards & Activities
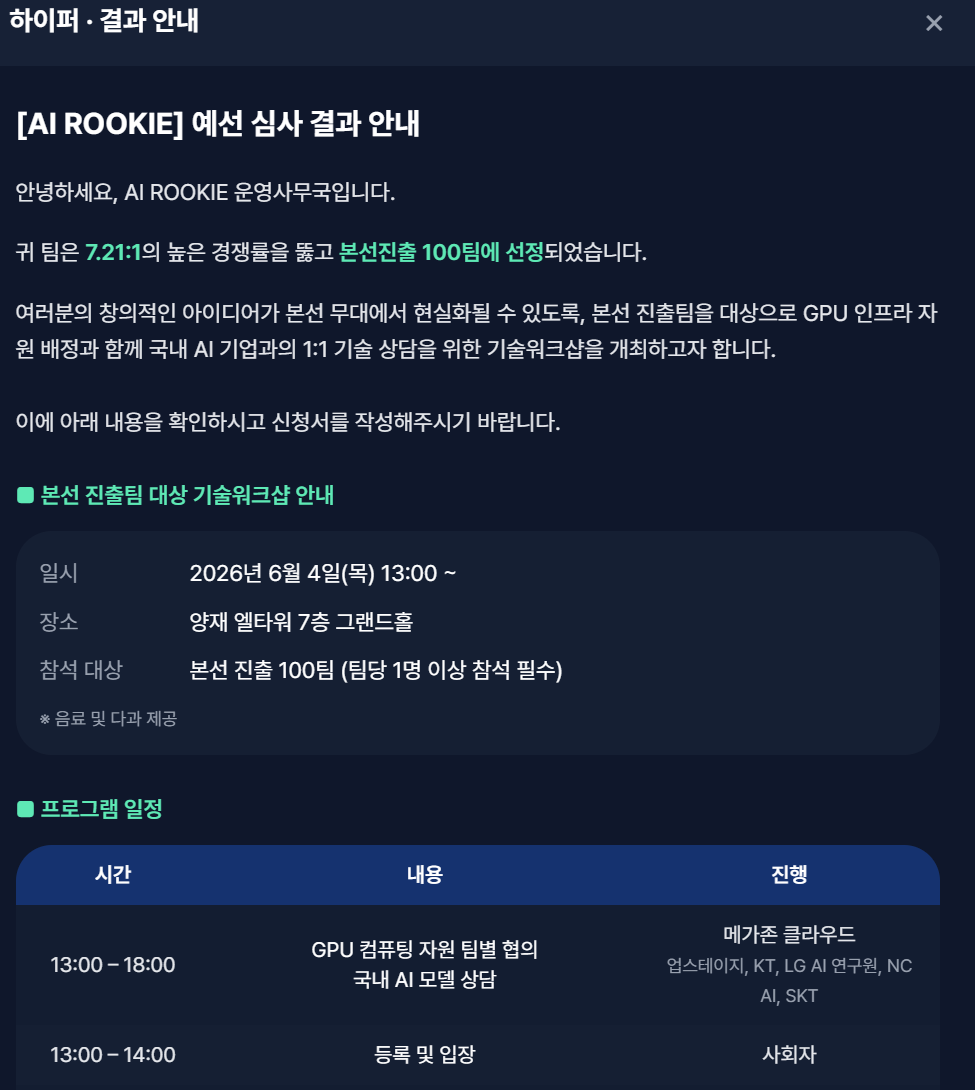
AI Rookie Competition, 2026
- Advanced to the final round of AI Rookie Competition, a national undergraduate AI competition hosted by the Ministry of Science and ICT and organized by NIPA and TTA.
- Participating in a project-based AI challenge with technical education and research infrastructure support, including domestic AI model tracks connected with KT, LG AI Research, NC AI, SKT, and Upstage.
Technical Experience
Robotics / Vision
ROS2 · Grounded-SAM · YOLO · Point Cloud Projection · Multi-view Fusion · Qwen
Robot Learning / Grasping
VGN · TSDF Representation · Synthetic Data Generation · Grasp Dataset Construction · Model Fine-tuning
Robotics / Hardware
Fusion 360 · URDF Modeling · Dynamixel · Inverse Kinematics
Programming / System
Python · C++ · Linux · CUDA Environment Setup · GPU Server Usage